Төрөл бүрийн хэлбэржилттэй талбайд машин-тракторын агрегатын ажлыг төлөвлөх: хэрэглэгддэг загварууд ба аргачлалууд
(Ленский А.В., Жешко А.А.)
Хөдөө аж ахуйд технологийн дэвшил, нөөцийг илүү үр ашигтай ашиглах шаардлага, экологийн хүчин зүйлсийн нөлөөлөл зэргээс шалтгаалан фермерүүд одоо хэрэглэж буй ажлын арга барилаа дахин үнэлж, автоматжуулсан систем зэрэг шинэ менежментийн шийдлүүдийг нэвтрүүлэх шаардлагатай болж байна. Полевийн робот ашиглах нь автоматжуулалтын ирээдүйтэй чиглэлүүдийн нэг юм.
Полевийн роботын хэрэглээ нь хүний оролцоог хамгийн бага түвшинд байлгах боломжтой бөгөөд өндөр үр ашигтай, аюулгүй технологи гэж тооцогддог. Өөрөө явагч хөдөө аж ахуйн техник нь талбайн нийт гадаргууг бүрэн боловсруулах үндсэн зорилготой тул технологийн процессыг талбай дээр бүрэн автоном байдлаар гүйцэтгэх чадвартай байх шаардлагатай.
Үүнтэй уялдан автоматжуулсан машин нь ажлын маршрутыг төлөвлөх зориулалтын тусгай алгоритмуудтай байх ёстой. Эдгээр алгоритмын оролтын детерминилсэн өгөгдөл нь талбайн хил хязгаар болон талбай дээр байрлах саад тотгорын мэдээлэл байна.
Технологийн үйл ажиллагааг төлөвлөх үед талбайн доторх хөдөлгөөн нь зам төлөвлөлтийн ерөнхий асуудлын нэгэн тусгай тохиолдол бөгөөд үүнд мэдрэгчидэд суурилсан онлайн төлөвлөлт, мөн бүрэн автоном төлөвлөлтийн горим хоёуланг нь ашиглах боломжтой.
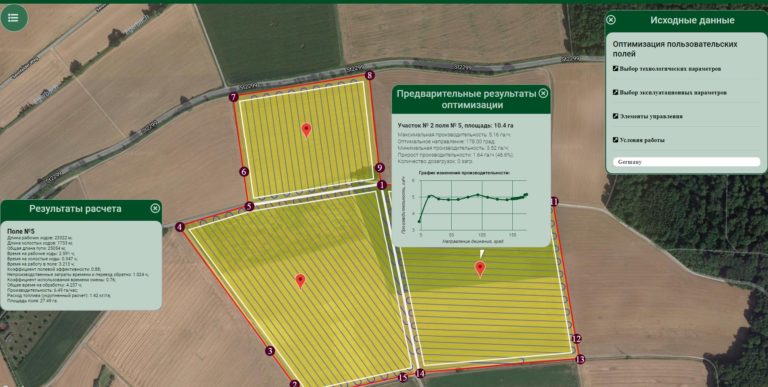
Машин-тракторын агрегатын ажлын төлөвлөлт
Оригинальные варианты публикаций:
Хязгаарлагдмал багтаамжтай техник болон орон зайн хувьсах нөхцөлд талбайн ажлыг хамран гүйцэтгэх маршрутыг бодит цагийн горимд оновчтой төлөвлөх нь (Гарет Эдвардс, Мартин Андреас Фальк Йенсен) - Real Time Optimisation of Field Coverage Route Planning
Олон төрлийн саад бүхий талбайд ажиллах хөдөө аж ахуйн машины маршрут төлөвлөлтийн оновчлолд суурилсан арга (K. Zhou, A.L. Jensen, D.D. Bochtis and C.G. Sørensen) - A Route Planning Method for Agricultural Machines Operating
LEGO Mindstorms NXT ашиглан төлөвлөгөөт талбайн ажиллагааг турших платформ (Gareth Edwards, Martin P. Christiansen, Dionysis D. Bochtis and Claus G. Sørensen) - A Test Platform for Planned Field Operations Using LEGO
Саадтай бүсүүдийг агуулсан талбайд хөдөө аж ахуйн роботыг чиглүүлэхэд зориулсан талбайн бүрхэлтийн оновчтой төлөвлөлтийн арга (Hameed, Ibrahim; Bochtis, Dionysis; Sørensen, Claus Aage Grøn) - An Optimized Field Coverage Planning